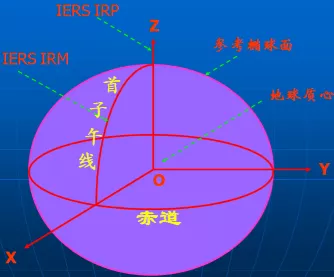
原點(diǎn):包括海洋和大氣的整個(gè)地球的質(zhì)量中心;
Z軸:由原點(diǎn)指向歷元2000.0的地球參考極的方向�;X軸:由原點(diǎn)指向格林尼治參考子午線與赤道面(歷元2000.0)的交點(diǎn);Y軸:與Z軸��、X軸構(gòu)成右手正交坐標(biāo)系�����;2000國(guó)家大地坐標(biāo)系采用橢球簡(jiǎn)稱CGCS2000橢球�����。CGCS2000橢球參數(shù)
長(zhǎng)半軸 α=6378137m
扁率 ?=1/298.257222101
地心引力常數(shù) GM=3.986004418x1014m3s-2地球自轉(zhuǎn)角速度 ω=7.292115x10-5rads-1 a)CGCS2000參考橢球是一旋轉(zhuǎn)橢球���,其幾何中心與CGCS2000的原點(diǎn)重合����,旋轉(zhuǎn)軸與CGCS2000的Z軸一致,其表面代表地球的數(shù)學(xué)表面�。b)CGCS2000參考橢球又是其表面為正常重力場(chǎng)的等位面的正常橢球。c)CGCS2000參考橢球由四個(gè)常數(shù)(a,GM,J2,ω)定義����。a)“2000中國(guó)大地坐標(biāo)系”,又稱“2000 國(guó)家大地坐標(biāo)系”���;英譯為 China Geodetic Coordinate System 2000,縮寫為 CGCS2000��;b)CGCS2000由原點(diǎn)����、尺度、坐標(biāo)軸的定向及其時(shí)間演變定義����,由地面點(diǎn)集合的坐標(biāo)和速度實(shí)現(xiàn);c) 采用CGCS2000參考橢球參數(shù)進(jìn)行三維坐標(biāo)變換�;d) 大地經(jīng)緯度變換為地圖平面坐標(biāo),采用高斯-克呂格投影或墨卡托投影��。2
大地測(cè)量控制點(diǎn)坐標(biāo)轉(zhuǎn)換技術(shù)規(guī)范
本標(biāo)準(zhǔn)規(guī)定了大地測(cè)量控制點(diǎn)坐標(biāo)轉(zhuǎn)換到2000國(guó)家大地坐標(biāo)系的技術(shù)要求���,包括重合點(diǎn)選取��、坐標(biāo)轉(zhuǎn)換模型���、轉(zhuǎn)換方法�����、精度評(píng)價(jià)等�����。本標(biāo)準(zhǔn)適用于地方獨(dú)立坐標(biāo)系�����、1954年北京坐標(biāo)系���、1980西安坐標(biāo)系、WGS-84坐標(biāo)系以及ITRF框架下的大地測(cè)量控制點(diǎn)向2000國(guó)家大地坐標(biāo)系的坐標(biāo)轉(zhuǎn)換���。2000國(guó)家大地坐標(biāo)系控制點(diǎn)實(shí)現(xiàn)精度及省��、市級(jí)衛(wèi)星大地控制網(wǎng)C級(jí)點(diǎn)��、D級(jí)點(diǎn)轉(zhuǎn)換后的精度要求見表1����。表1 2000國(guó)家大地坐標(biāo)系控制點(diǎn)點(diǎn)位中誤差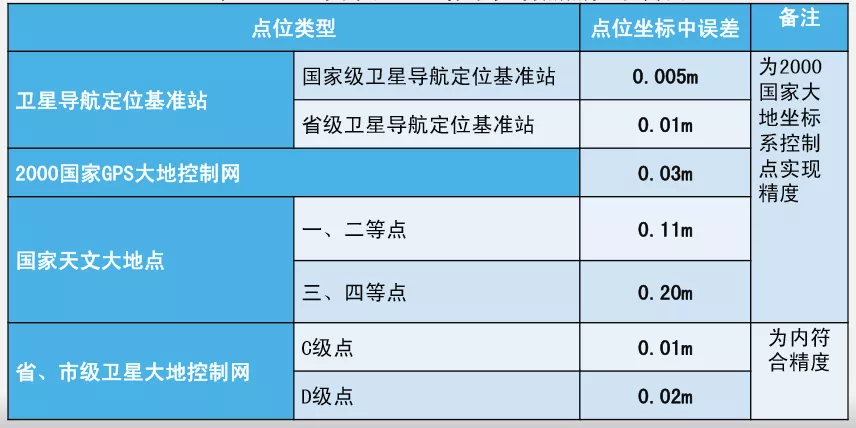
2000國(guó)家大地坐標(biāo)系坐標(biāo)框架2000國(guó)家大地坐標(biāo)系的框架由2000國(guó)家大地控制網(wǎng)點(diǎn)組成,其參考框架是ITRF97,參考?xì)v元為2000.0�。(1)2000國(guó)家大地控制網(wǎng)構(gòu)成
① 2000國(guó)家GPS大地控制網(wǎng),及其控制下完成的?。ㄊ校〨PS 基礎(chǔ)控制網(wǎng);② 在2000系下完成天文大地網(wǎng)聯(lián)合平差獲得的近5萬個(gè)一����、二等天文大地網(wǎng)點(diǎn);③ 在2000系下平差后獲得的近8萬個(gè)三�、四等天文大地網(wǎng)點(diǎn)�����。(2)2000國(guó)家大地控制網(wǎng)按精度不同可劃分為三個(gè)層次網(wǎng)第一層次為CGCS2000連續(xù)運(yùn)行GPS網(wǎng)(國(guó)家CORS系統(tǒng))�����。CGCS2000的維持 主要依靠連續(xù)運(yùn)行GPS觀測(cè)站, 它們是CGCS2000的骨架, 其坐標(biāo)精度為mm級(jí), 速度精度為1mm/a�。 第二層次為2000國(guó)家GPS大地控制網(wǎng)。由全國(guó)GPS一��、二級(jí)網(wǎng)、國(guó)家GPS A�����、 B級(jí)網(wǎng)����,地殼運(yùn)動(dòng)監(jiān)測(cè)網(wǎng)和地殼運(yùn)動(dòng)觀測(cè)網(wǎng)絡(luò)工程網(wǎng)組成, 共計(jì)2600多點(diǎn), 其三維地心坐標(biāo)精度約為3cm。在2000國(guó)家GPS大地控制網(wǎng)下建立的?�。ㄊ校〨PS 基礎(chǔ)控制網(wǎng)����。 第三層次為2000系下獲得的全國(guó)天文大地控制網(wǎng)(約有5萬點(diǎn))與全國(guó)三、 四等三角網(wǎng)(約有8萬點(diǎn))�。它是CGCS2000的加密框架。全國(guó)天文大地網(wǎng)平均點(diǎn)位精度達(dá)到±0.11m(整體平差結(jié)果)����,大地高誤差不超過0.5m,全國(guó)三��、 四等三角網(wǎng)平均點(diǎn)位精度為±0.07m(相對(duì)國(guó)家一二等三角點(diǎn)分區(qū)平差結(jié)果)����。2000國(guó)家大地坐標(biāo)系坐標(biāo)框架特點(diǎn)空間大地網(wǎng)——2000國(guó)家GPS大地控制網(wǎng)(20年)����;地面大地網(wǎng)——國(guó)家天文大地控制網(wǎng)(70多年)���。2000GPS網(wǎng)2500多點(diǎn)�����、4600多條基線�;當(dāng)前4508點(diǎn)����。天文大地網(wǎng)近5萬點(diǎn)、未知參數(shù)20多萬個(gè)�;30多萬條觀測(cè)信息。天文大地網(wǎng)覆蓋全國(guó)內(nèi)陸地區(qū)��;2000GPS控制網(wǎng)覆蓋全國(guó)內(nèi)陸和部分沿海島嶼����。高精度控制點(diǎn)可用于低精度控制網(wǎng)的外部控制�����。
a)國(guó)家級(jí)衛(wèi)星導(dǎo)航定位基準(zhǔn)站點(diǎn):可作為省級(jí)及以下衛(wèi)星導(dǎo)航定位基準(zhǔn)站網(wǎng)建設(shè)的控制點(diǎn)。b)2000國(guó)家GPS大地控制網(wǎng)點(diǎn):可作為天文大地點(diǎn)控制點(diǎn)及相 對(duì)獨(dú)立的平面坐標(biāo)系建立控制點(diǎn)���。c)省級(jí)衛(wèi)星導(dǎo)航定位基準(zhǔn)站點(diǎn):點(diǎn)位坐標(biāo)歸算到2000國(guó)家大 地坐標(biāo)系后�,可作為C��、D控制點(diǎn)及相對(duì)獨(dú)立的平面坐標(biāo)系建立控制點(diǎn)����。d)省、市衛(wèi)星大地控制網(wǎng)C級(jí)點(diǎn)����、D級(jí)點(diǎn):點(diǎn)位坐標(biāo)歸算到 2000國(guó)家大地坐標(biāo)系后,可作為建立相對(duì)獨(dú)立的平面坐標(biāo)系的控制點(diǎn)����。4
模型選用和適用范圍
控制點(diǎn)轉(zhuǎn)換到2000國(guó)家大地坐標(biāo)系的轉(zhuǎn)換模型及適用范圍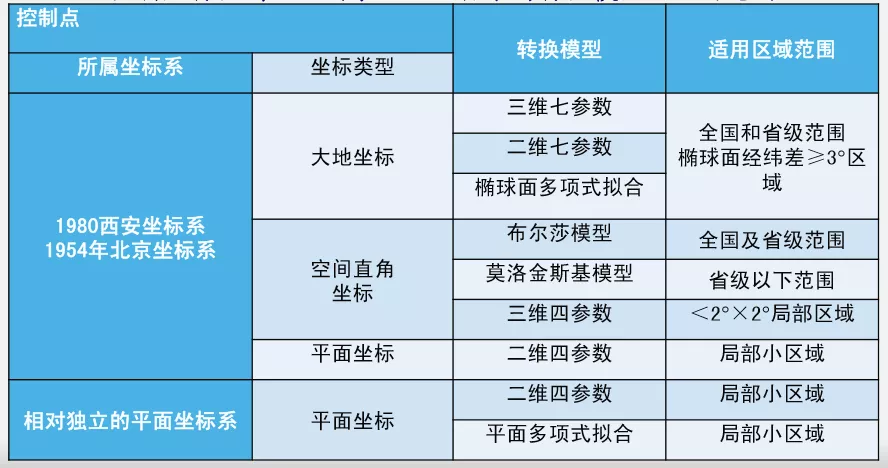
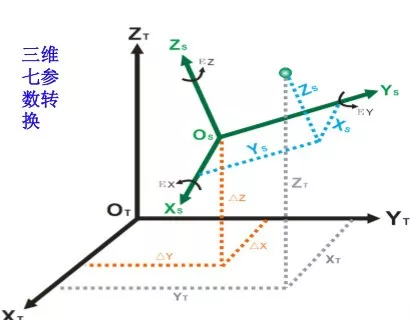
a)空間直角坐標(biāo)轉(zhuǎn)換模型:包括布爾莎模型和莫洛金斯基模型,用于不同參考橢球間空間直角坐標(biāo)轉(zhuǎn)換��,重合點(diǎn)坐標(biāo)為X����、Y和 Z;b)三維七參數(shù)大地坐標(biāo)轉(zhuǎn)換模型:用于不同參考橢球間的大地坐標(biāo)轉(zhuǎn)換�,重合點(diǎn)坐標(biāo)為B�����、L和H�����;c)二維七參數(shù)大地坐標(biāo)轉(zhuǎn)換模型:用于不同參考橢球間的橢球面上大地坐標(biāo)轉(zhuǎn)換�����,重合點(diǎn)坐標(biāo)為B和L���;d)三維四參數(shù)空間直角坐標(biāo)轉(zhuǎn)換模型:用于不同參考橢球間的空間直角坐標(biāo)系間的坐標(biāo)轉(zhuǎn)換,重合點(diǎn)坐標(biāo)為X��、Y和Z���;e)二維四參數(shù)平面坐標(biāo)轉(zhuǎn)換模型:用于不同高斯投影平面坐標(biāo)轉(zhuǎn)換��,重合點(diǎn)坐標(biāo)為x和y�;f)多項(xiàng)式擬合模型:有橢球面和平面兩種形式�。不同坐標(biāo)系之間的坐標(biāo)轉(zhuǎn)換模式不同坐標(biāo)系之間的坐標(biāo)轉(zhuǎn)換通常有兩類轉(zhuǎn)換模式:二維轉(zhuǎn)換模式��、三維轉(zhuǎn)換模式。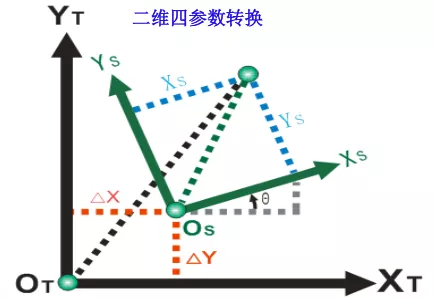
各種轉(zhuǎn)換模型各有其特點(diǎn)和適用性�����,因此�����,在坐標(biāo)轉(zhuǎn)換時(shí)����,對(duì)各種坐標(biāo)轉(zhuǎn)換模型的適用特點(diǎn)、影響因素及轉(zhuǎn)換精度進(jìn)行分析����,為不同區(qū)域坐標(biāo)系之間的坐標(biāo)轉(zhuǎn)換選擇合適的坐標(biāo)轉(zhuǎn)換模型提供依據(jù)是十分必要的。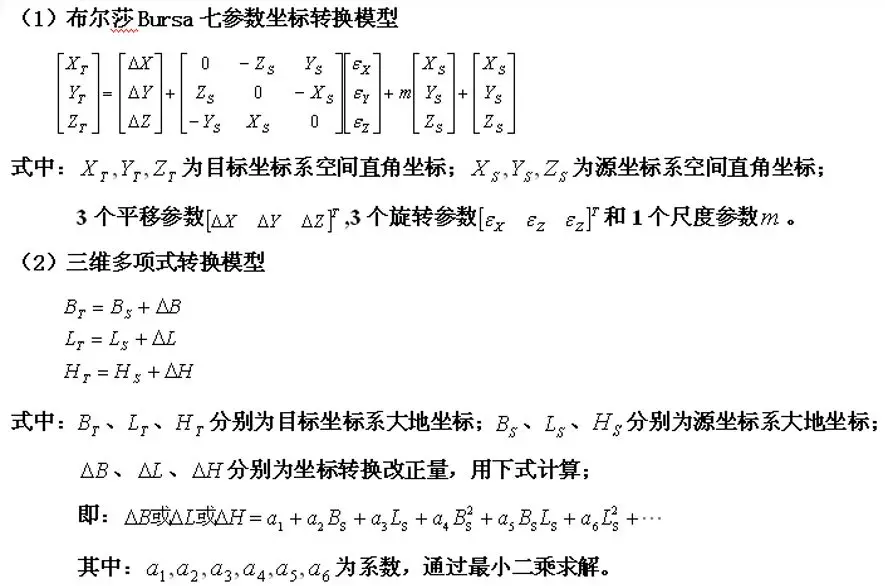
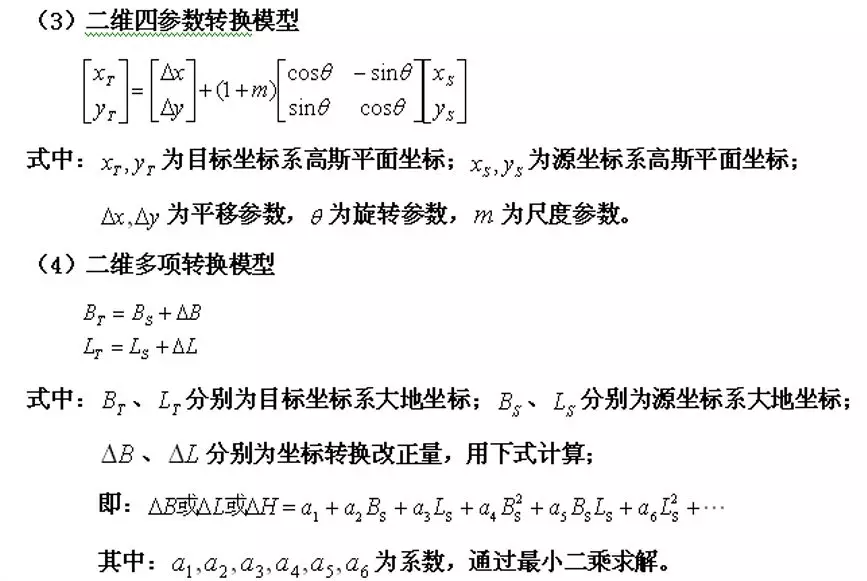
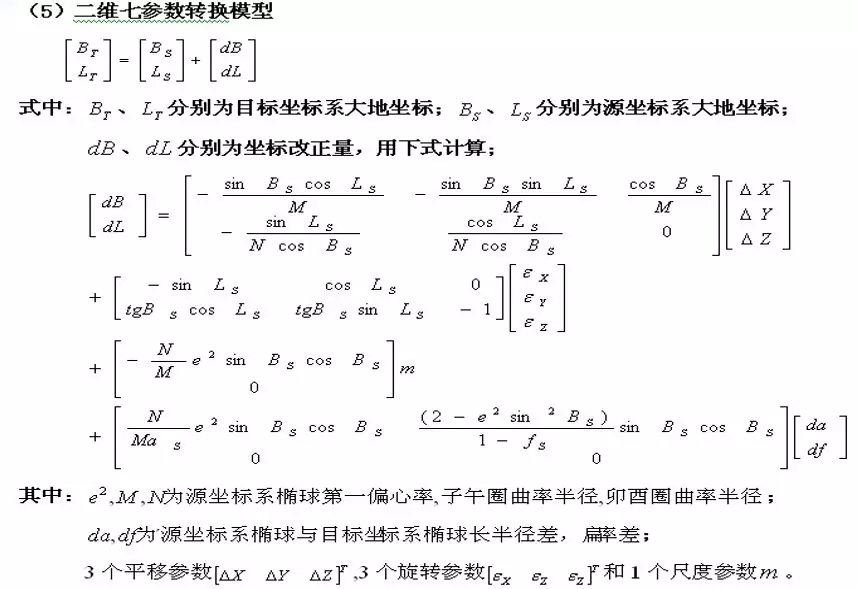
各坐標(biāo)轉(zhuǎn)換模型的特點(diǎn)① 布爾莎Bursa七參數(shù)為三維空間直角坐標(biāo)轉(zhuǎn)換模型��,不存在模型誤差和投影變形誤差���,可適用于任何區(qū)域的高精度坐標(biāo)轉(zhuǎn)換�。② 二維四參數(shù)為高斯平面坐標(biāo)轉(zhuǎn)換模型����,由于受投影變形誤差的影響�,離中央子午線越遠(yuǎn)其轉(zhuǎn)換精度越差�����,因此�,它一般適用于較小區(qū)域的轉(zhuǎn)換。③ 二維七參數(shù)為橢球面上的二維轉(zhuǎn)換模型���,不存在投影變形誤差����, 因此基本不受范圍的限制����,且轉(zhuǎn)換精度較高。但是它計(jì)算復(fù)雜�。④ 三維多項(xiàng)式與二維多項(xiàng)式均是一種多項(xiàng)式逼近(擬合)的轉(zhuǎn)換模型。當(dāng)重合點(diǎn)分布均勻�����、數(shù)量足夠�,且目標(biāo)坐標(biāo)系的精度比源坐標(biāo)系的精度高時(shí)���,可以得到較高的轉(zhuǎn)換精度���。但當(dāng)重合點(diǎn)數(shù)量較少且分布不均勻時(shí)�����,轉(zhuǎn)換精度降低�����,尤其不適用于轉(zhuǎn)換外推�。



 川公網(wǎng)安備 51015602000116號(hào)
川公網(wǎng)安備 51015602000116號(hào)









